There are many challenges in designing robots to interact with humans. We are particularly looking at how to design robots to assist people. Many people who would most benefit from the assistance of a robot are from vulnerable populations, e.g., older adults and children with autism. For robots in these scenarios, extra measures are necessary to ensure that the robot is protecting the dignity and autonomy of the user.
Behavior Generation
We are developing an approach for automatically generating multimodal assistive behaviors for social robots. Given an intent (i.e., a description of what the robot needs to communicate) and characteristics of the user and task (e.g., robot's rapport with user, how much help the user needs/wants), we use an AI planner to generate the specific details of what the robot says, gestures it makes, and gaze patterns it uses. Our design goals are to be effective in aiding the user, be adaptive to the user's condition, and be interoperable across multiple robot platforms.
Robot Explanations and User Preferences
We are developing a system for Preferences, Assistance, and eXplanations (PAX). In this system, commonsense reasoning is applied to track and update user preferences and provide users with explanations of the robot's actions.

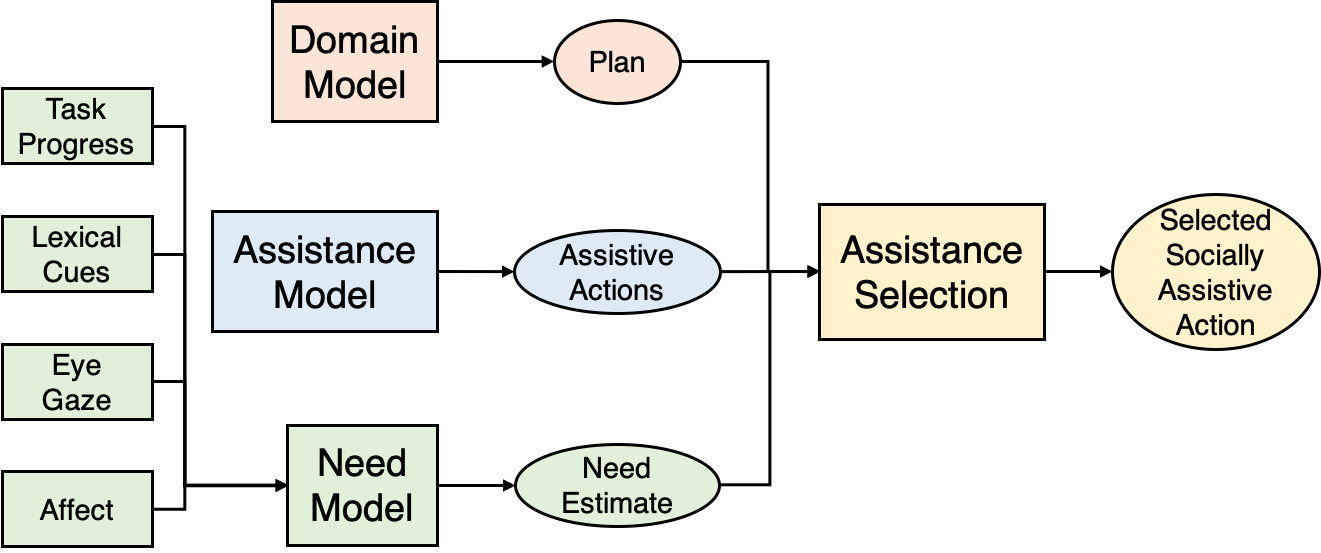
Hint Engine
The Hint Engine generates an action for a robot to take to assist a user. To determine when and how to assist, the Hint Engine integrates information from a domain model, assistance model, and need model. To enable the Hint Engine to adapt to new scenarios, it uses a hierarchical task network to represent domains in which the robot is to operate.